Here are a few photos taken during the Haptics Class Project Demonstrations on April 27, 2012.
<Prev 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 | 25 | 26 Next>
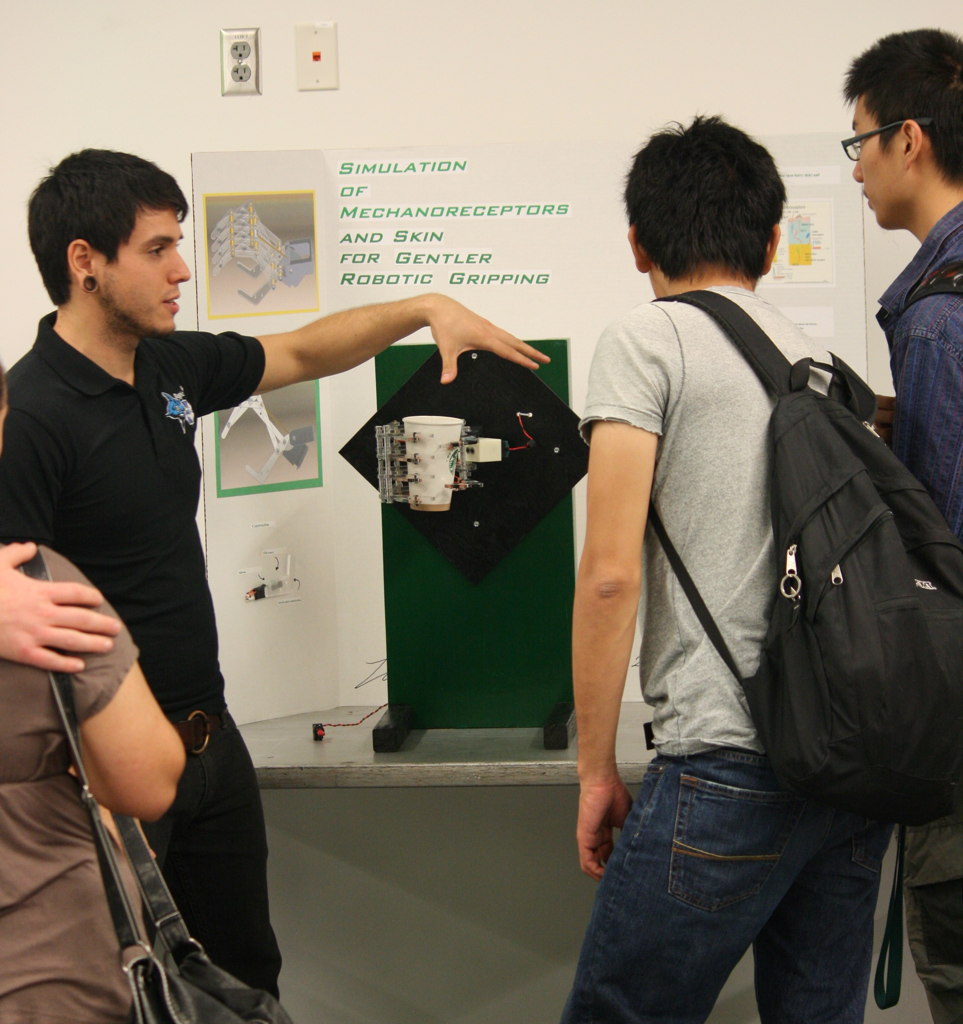
Simulation of Mechanoreceptors and Skin for Gentler Robotic Gripping This is 6 bar linkage mechanism that employs force sensing resistors and silicone molded strips to simulate skin and Merkel Disk mechanoreceptors. The purpose of this mechanism is to successfully grip objects without crushing them, using only necessary effort for action. Testing was conducted to quantify values of sensitivity that would give effective response when gripping a range of objects. More information can be found here.
|