Rehabilitation Engineering and Electromechanical Design Lab
|
|
| Our research lab is at the forefront of innovation in haptics and rehabilitation, focusing on enhancing the quality of life for individuals with asymmetric impairments such as those caused by strokes or unilateral amputations. We specialize in understanding the complex interactions between the human body and various stimuli to develop advanced rehabilitation techniques and haptic feedback systems. | ||
Haptics and Rehabilitation Synergy In our lab, we explore the sense of touch through haptics, investigating thermal responses, coordinated motions, and force feedback interactions. Our work in haptics seamlessly integrates with our rehabilitation research, aiming to restore and enhance motor functions. By leveraging insights from both fields, we design interventions that can elicit specific responses, whether for rehabilitation purposes or enriching virtual environments. For instance, our bimanual research benefits both training scenarios (like those for pilots and surgeons) and rehabilitation, where the healthy limb can guide the impaired one. | ||
Advancing Home-Based Rehabilitation One of our primary goals is to enable effective rehabilitation outside of clinical settings, such as in patients' homes. Home-based rehabilitation is crucial for meeting the growing demand for physical therapy while reducing healthcare costs. We strive to understand how altering physical parameters can improve walking and reaching abilities, and how these changes can lead to lasting cognitive improvements that transfer to real-world tasks. | ||
Interdisciplinary Approach Our lab's work is inherently interdisciplinary, drawing upon engineering, haptics, human-robot interaction, rehabilitation, and medical robotics. This multifaceted approach allows us to tackle complex rehabilitation challenges from multiple angles, ensuring comprehensive solutions that address both physical and cognitive aspects of recovery. | ||
Research Projects | ||
evergait™ Go (click for more information):
| ||
Choose Your Own Lecture (click for more information): Imagine combining the flexibility of self-paced video learning with the ability to ask questions and receive instructor guidance exactly when confusion occurs. Choose Your Own Lecture (CYOL) transforms traditional recorded lectures into interactive learning experiences by allowing students to engage with content, instructors, and peer questions directly within the lecture. Whether used in online courses, hybrid classrooms, workforce training, or professional development, CYOL creates a more personalized and engaging learning environment. Learn how CYOL is redefining educational technology and helping students learn more effectively by exploring the platform overview and demonstration. | ||
Thermal Haptics (click for more information) This research focuses on thermal haptics, how humans perceive temperature, and how the brain and temperature interact with each other. In the field of haptics, researchers have mostly focused on fast-response modality cues such as vibrations and forces due to their promising potentials in conveying information to the user. On the contrary, thermal haptics has not been investigated as much as needed due to slow-response characteristics and difficulty in actuating thermal stimulus. Thermal cues have great potential for gaming, psychological, and medical applications as well as applications in VR. In a series of studies, we investigate the effect of temperature on the body, brain, and emotions as well as biological theories related to temperature perception. | ||
Human Force Interactions (click for more information) This research seeks to mesh humans and robots more effectively to improve our quality of life. Our contribution toward this broad goal is investigating how we sense and interact with forces, other humans, and robots. | ||
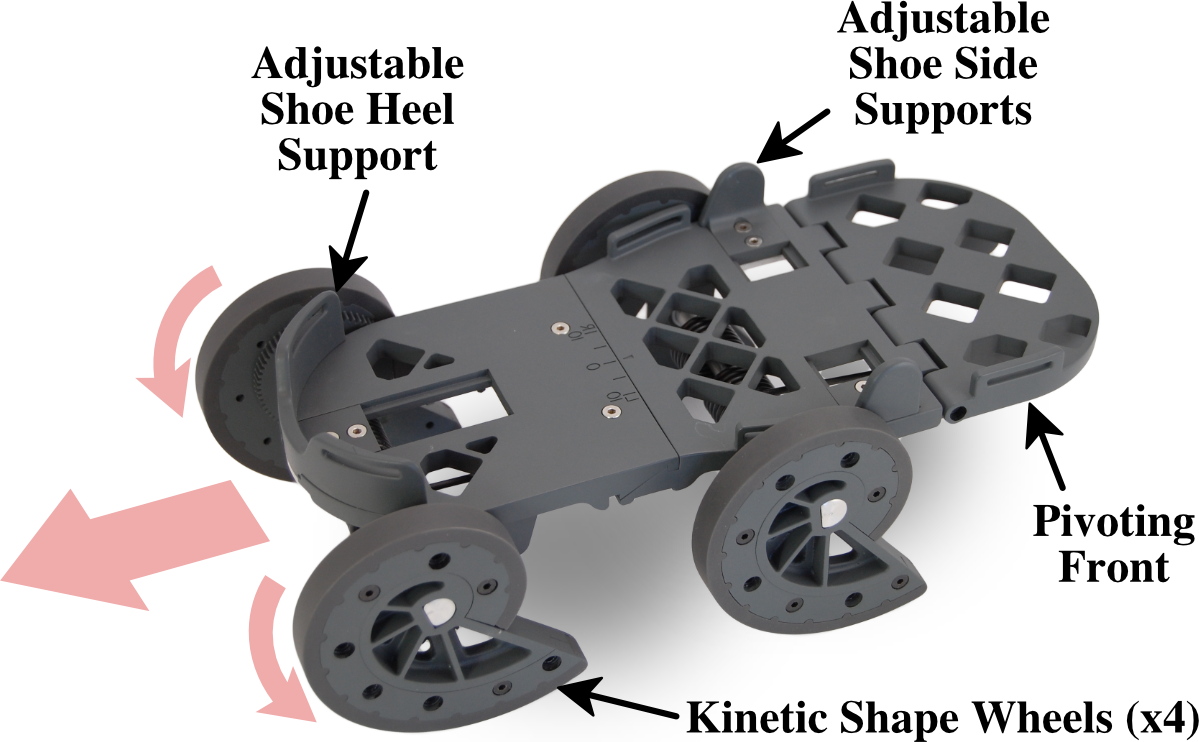
Passive dynamic walkers (PDW) are devices that are able to walk down a slope without any active feedback using gravity as the only energy source. In this research, we are examining asymmetric walking in a similar, but different approach, as the above evergait™ Go Project. By changing one physical parameter on one of the two legs in the PDW, we can show a number of stable asymmetric gait patterns where one leg has a consistenty different step length than the other, as shown on the right. The figure on the right has the right knee moved up the leg. This asymmetric model of walking will enable us to test the effect of different physical changes on how individuals will alter their gait. | ||
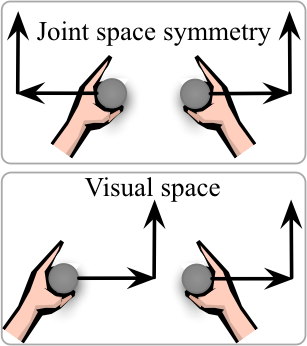
Bimanual Motions:
If you would like to test your coordination on a bimanual game, then check out Pat & Rub. This is an app we developed to help people understand how they can perform coordinated bimanual motions and to help us understand what types of motions are possible. | ||
Human-Robot-Human Interaction (click for more information):
In many everyday tasks two people interact with each other. People move a large object, an instructor helps a student learn to swing a tennis racquet, and physical therapists help a patient learn to move correctly after an accident. Many of these tasks could potentially be replaced with a robot teaching an individual that task. A necessary first step is to understand human-human physical cooperation, so this research measures the haptic interaction of dyads jointly working on a task. This work has discovered that dyads are faster than individuals, dyad members temporally specialize, and similar key differences between human-human and human-robot interaction that should enable improved human-robot interaction. | ||
Haptics (EML 4593/6930): Part of the Haptics class project is to build a haptic device and/or conduct psychophysical experiments. Here are a few photos of the demonstrations from Spring 2010, Spring 2011, Spring 2012, Spring 2013, Spring 2014, and Fall 2015. |