Here are a few pictures from the Haptics Class Project Open House on April 30, 2010.
<Prev 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 Next>
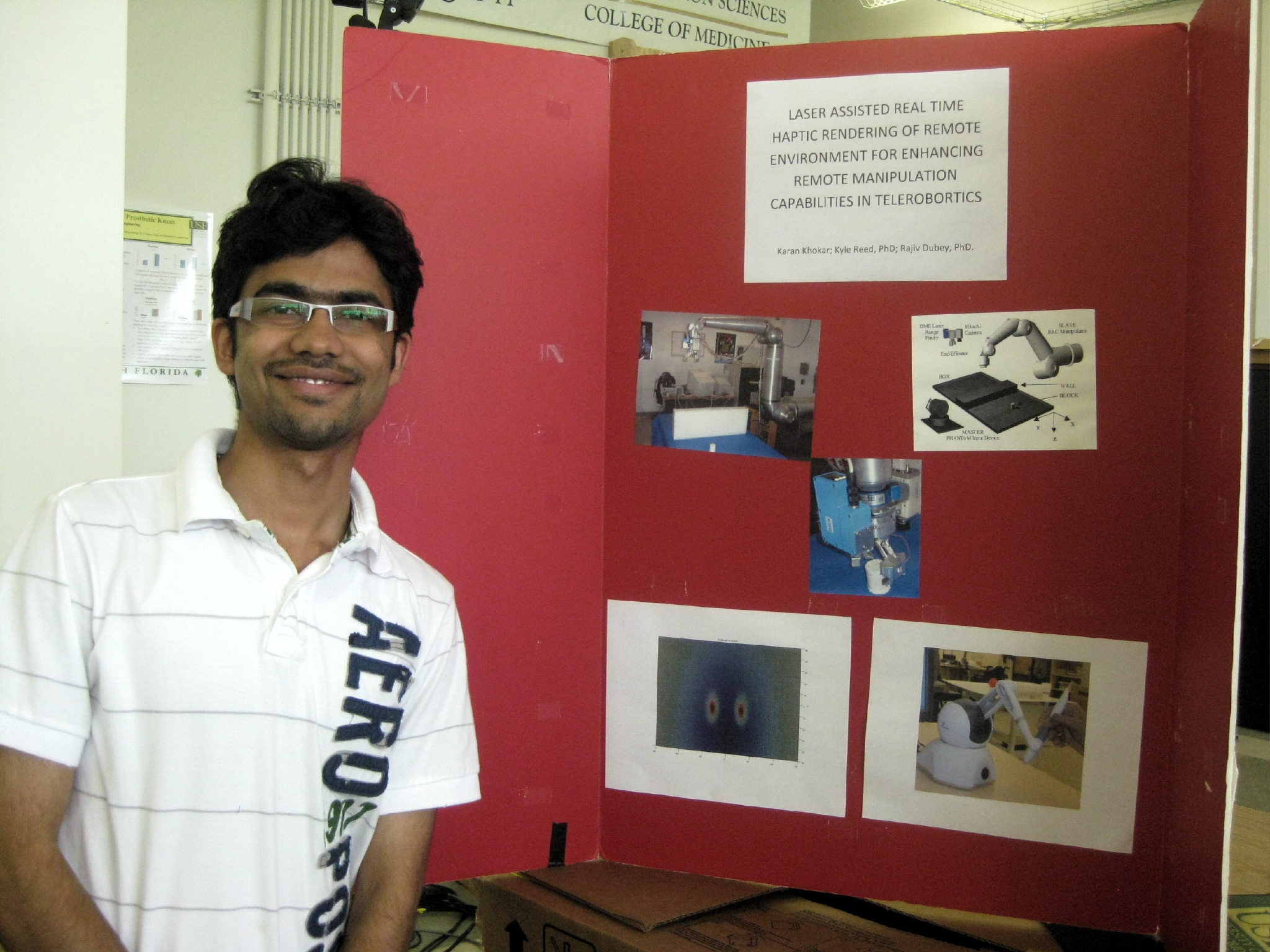
Haptic Telerobotic Assistance using Potential Fields Generated from Real-time Sensor Data In this project, we provided assistance to a user at the master side teleoperating a remote manipulator with force feedback using the potential field concept. The potential field is generated in real-time from the laser range data which is mounted on the end-effector of the remote manipulator. The user teleoperates to point the laser pointer to obstacles and targets in the remote environment and a force field based environment model is generated which is mapped onto the haptic workspace of the master device. The user is in the loop and the task is executed under human supervisory control. We demonstrated the execution of a pick and place task with obstacles between the source and destination points.
|