|
|
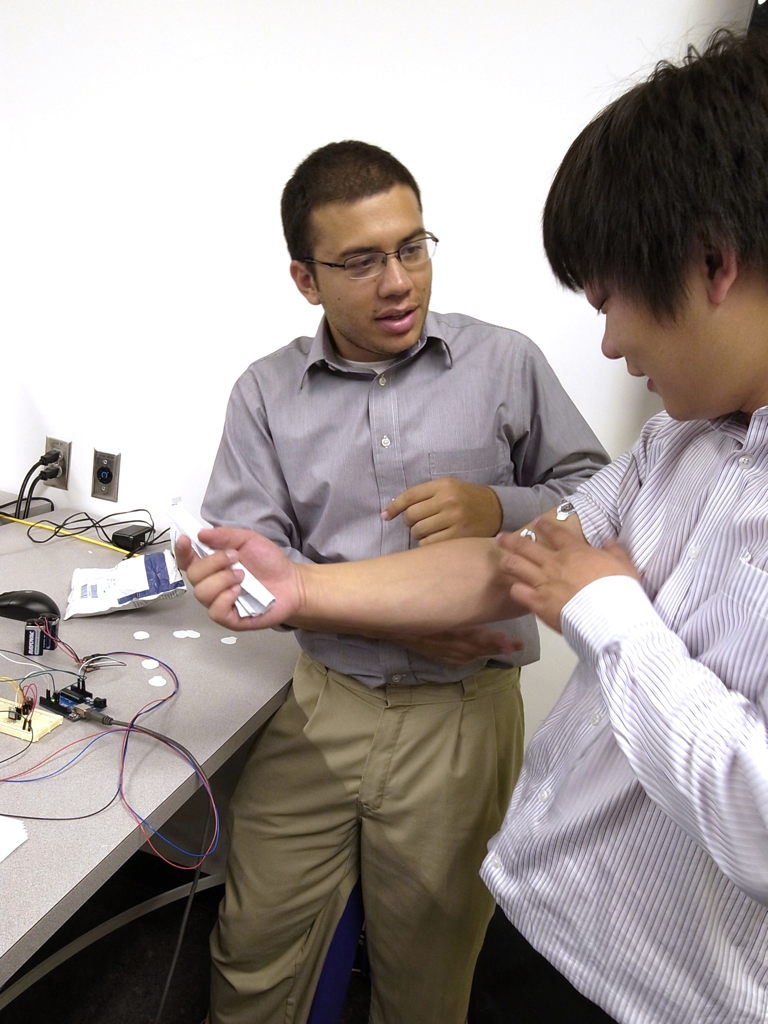
Students from Haptics, Kinematics/Dynamics, and Modern Biomedical Technologies demonstrated their projects, April 25, 2013.
<Prev 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 Next>
Single Channel Threshold Control on a Single Degree of Freedom Flexion Device
With the advent of exoskeletons, there have been many different approaches to their control. Most systems today use either force transducers or electromyography to acquire certain inputs that would be later used in the control algorithm. More robust systems use force transducers, but those require the user to have full kinetic range. This method would not be appropriate for users that have a limited kinetic range. The preferable method would be the use of electromyography. Even though limited in movement, the electrical muscle impulses of the user could be acquired and used to control actuators. This project strives to investigate the use of a single channel threshold control algorithm. Once the user's electrical signal is acquired it will be compared to a specified threshold that would control the output of a linear actuator.
|