
|
|
Human Force Interactions
Project Background
 |
Bimanual device to assess interaction of forces |
This research seeks to mesh humans and robots more effectively to improve our quality of life. Our contribution toward this broad goal is investigating how we sense and interact with forces, other humans, and robots.
A motivating example from our work is a project where we are quantifying treatment given by physical therapists in the medical field so patients get more consistent and accurate treatment to speed up recovery. This is part of a much broader, long standing effort to provide evidence based healthcare. In order to move toward that goal of comparing treatments based on qualitative data, we must first understand the current state of treatment. This project is about doing just that in physical therapy using robotics.
Another area of focus for us is understanding how humans control robotic systems. So, let's say that in 14 years that you want to have a firefighter piloting a swarm of fire extinguishing drones: taking the best of both the human's ability to contextualize new information and react and the robot's indefatigable, fearless, and precise characteristics. To do that, you need virtual interfaces and control systems that work with the pilot. Our research is about understanding the nuances of those types of interactions to enable the next wave of robotic technology like fire fighting drone swarms.
Technical Details
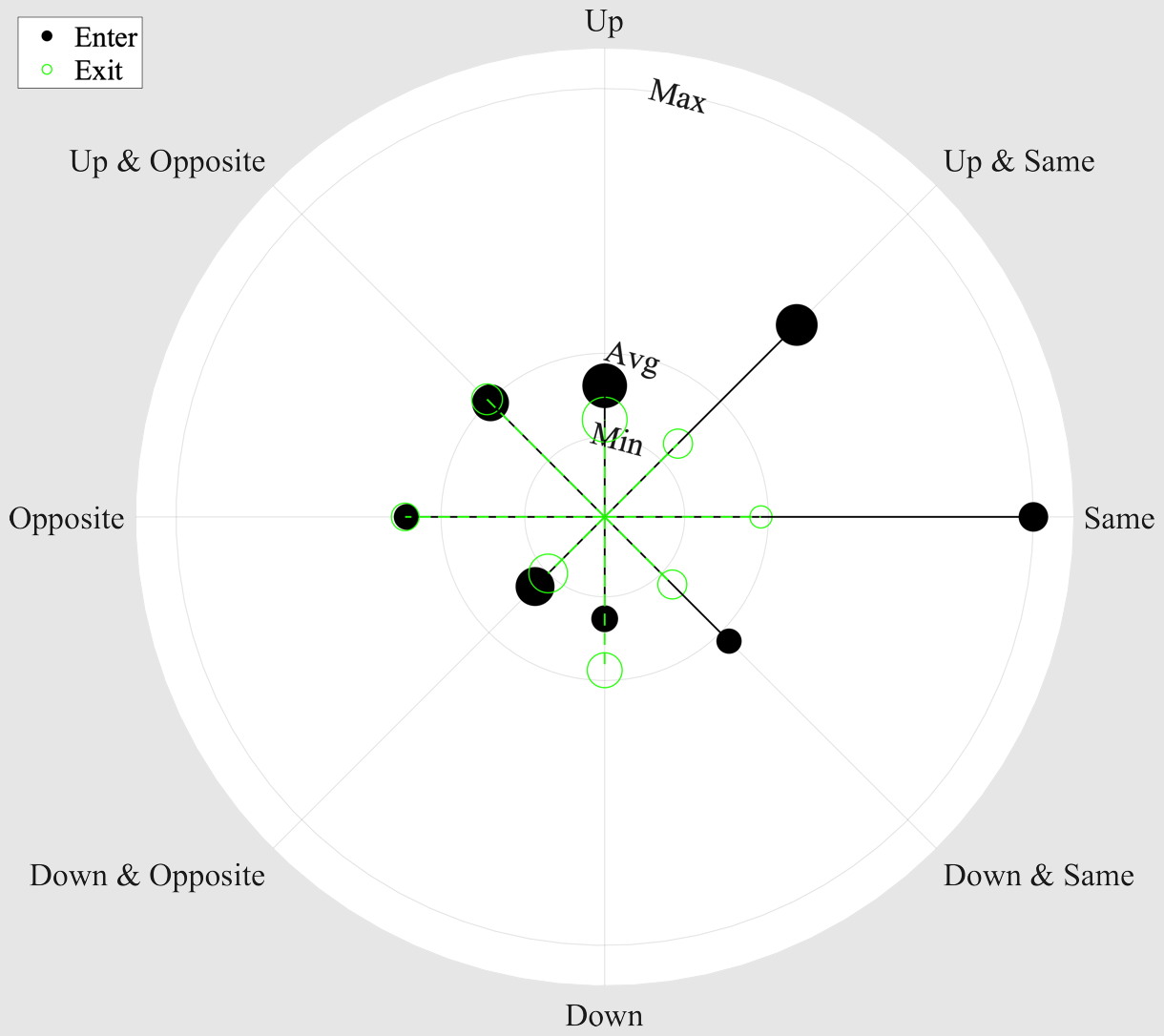 |
Relationship of how applying a force while moving affects performance. See related paper for more information. |
The first piece investigates how humans can control position through self-generated forces during dynamic tasks. We have explored several factors including how the speed of the task, the direction of perturbing forces, and the perturbation profile affect the position accuracy in a task. As mentioned above, we are evaluating the dynamic motor skills of physical therapists using a task that approximates patient-assistive interactions, which are essentially position control motions using self-generated forces.
Another piece inspects how humans control complicated systems. A series of cart inverted pendulums are used to investigate this relationship where the task is to balance the inverted pendulum by controlling the cart. We are investigating how performance is affected by a number of consequential factors such as the system's degrees of freedom, the control interface, and the human-computer or human-machine interface.
Finally, on a more fundamental level, we are studying several important factors affecting the memory of force perceptions in discrimination tasks. The effects of the inter-stimulus interval and the persistence of a force perception memory are individually examined. We are applying this research to our other research in physical therapy.
Related Publications
- B. Rigsby and K. B. Reed. "Accuracy of dynamic force compensation varies with direction and speed", IEEE Transactions on Haptics, Volume 12, Number 4, pp. 658-664, 2019.
[ IEEE Xplore ] - D. Menychtas, T. Sullins, B. Rigsby, S. Carey, and K. B. Reed, "Assessing the role of preknowledge in force compensation during a tracking task", in Conf. Proc. IEEE Eng. Med. Biol. Soc. (EMBC), 2016.
[ pdf ] - B. Rigsby and K. B. Reed, "Effect of Weight and Number of Fingers on Bimanual Force Recreation", IEEE Eng. Med. Biol. Soc. (EMBC), 2016.
[ pdf ] - B. Rigsby and K. B. Reed, "Assessing the Effect of Experience on Bimanual Force Recreation", IEEE Eng. Med. Biol. Soc. (EMBC), 2016.
[ pdf ] - Benjamin Rigsby. "Force Compensation and Recreation Accuracy in Humans", Master's Thesis, University of South Florida, 2017.
[ pdf ] - N. Valles and K. B. Reed. "To Know Your Own Strength: Overriding Natural Force Attenuation", IEEE Transactions on Haptics, Vol. 7, No. 2, pp. 264-269, 2014.
[ IEEE Xplore | pdf | abstract ] - S. McAmis and K. B. Reed. "Effects of Compliant Coupling on Cooperative and Bimanual Task Performance", Journal of Rehabilitation Robotics, Vol. 1, Num. 2, pp. 99-108, 2013.
[ Synergy Publishers | pdf | abstract ] - S. McAmis and K. B. Reed, "Design and Analysis of a Compliant Bimanual Rehabilitation Device", Proc. of the 13th Intl. Conf. on Rehabilitation Robotics (ICORR), Seattle, USA, June, 2013.
[ pdf ] - S. McAmis and K. B. Reed. "Simultaneous Perception of Forces and Motions Using Bimanual Interactions", IEEE Transactions on Haptics, Special Issue on Haptic Human-Robot Interaction, Vol. 5, Num. 3, pp. 220-230, 2012.
[ IEEE Xplore | pdf | abstract ] - S. McAmis and K. B. Reed, "Symmetry Modes and Stiffnesses for Bimanual Rehabilitation", Proc. of the 12th Intl. Conf. on Rehabilitation Robotics (ICORR), Zurich, Switzerland, June, 2011.
[ pdf ] - H. G. Malabet, R. A. Robles, and K. B. Reed, "Symmetric Motions for Bimanual Rehabilitation", Proc. of IEEE Intl. Conf. on Intelligent Robots and Systems (IROS), Taipei, Taiwan, October, 2010.
[ pdf ]
This work was supported by the National Science Foundation under Grant IIS-1319802.
